Publications
A collection of my research work.
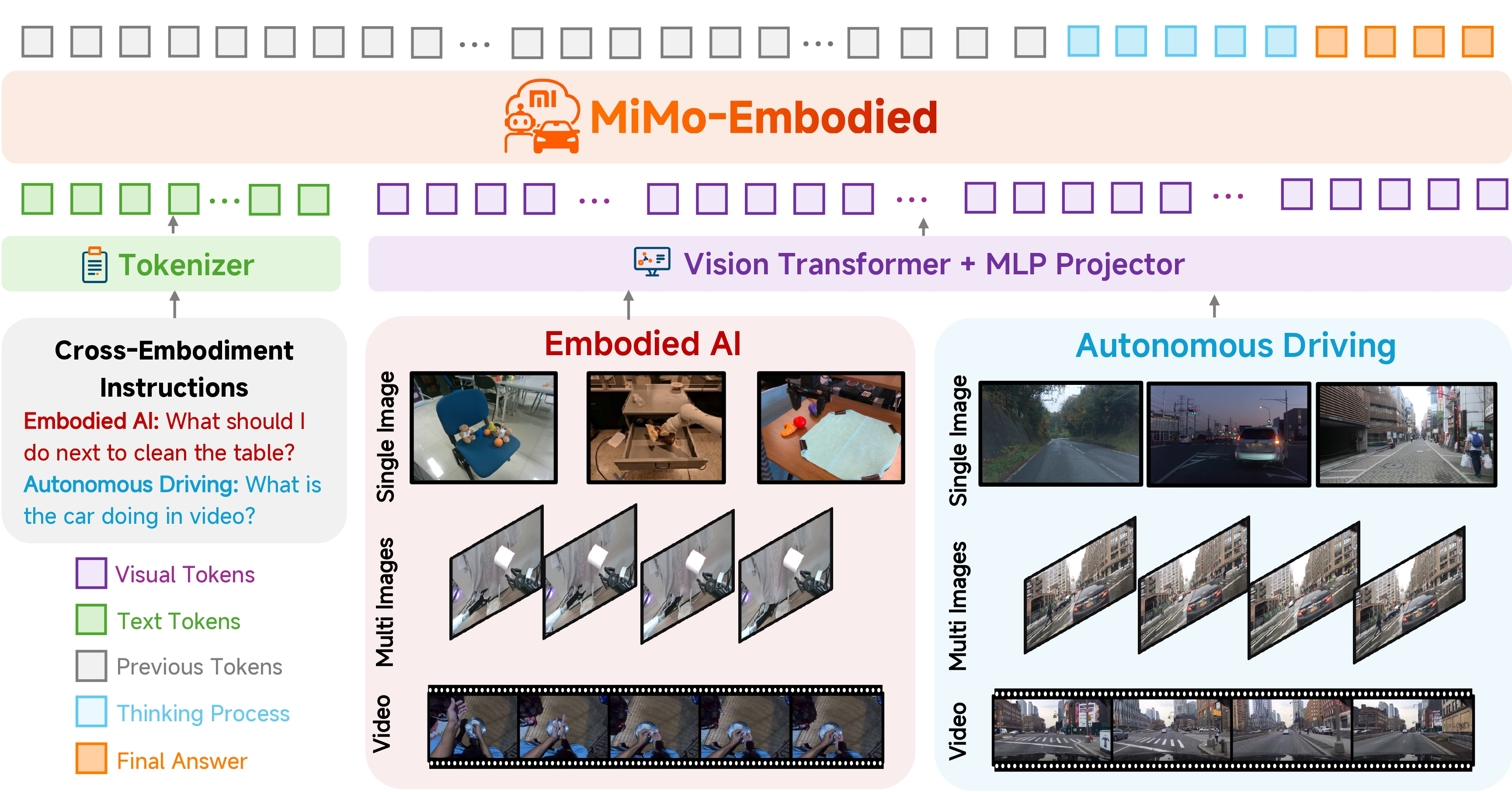
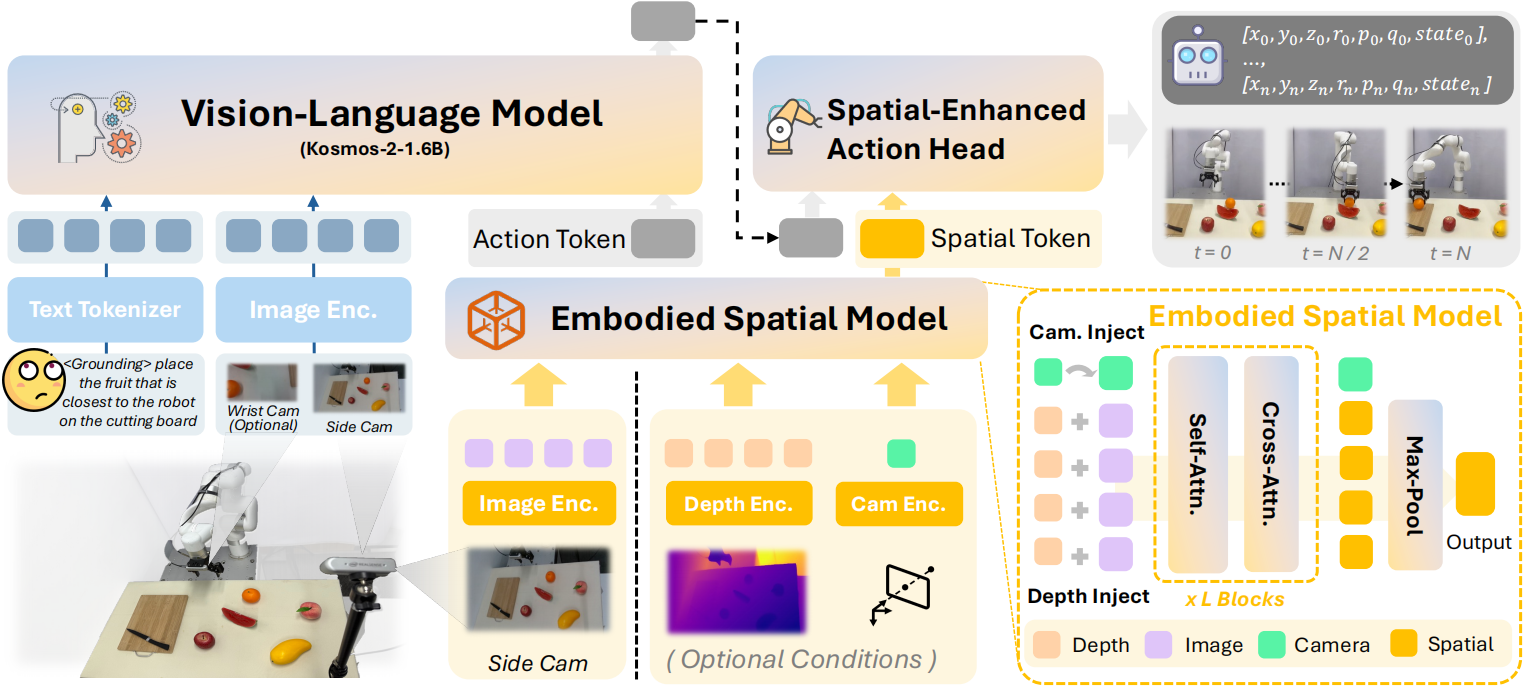
From Spatial to Actions: Grounding Vision-Language-Action Model in Spatial Foundation Priors
Zhengshen Zhang, Hao Li, Yalun Dai, Zhengbang Zhu, Lei Zhou, Chenchen Liu, Dong Wang, Francis E. H. Tay, Sijin Chen, Ziwei Liu, Yuxiao Liu, Xinghang Li, Pan Zhou
ICLR 2026
Injecting 3D spatial tokens into VLA models for better geometric understanding.
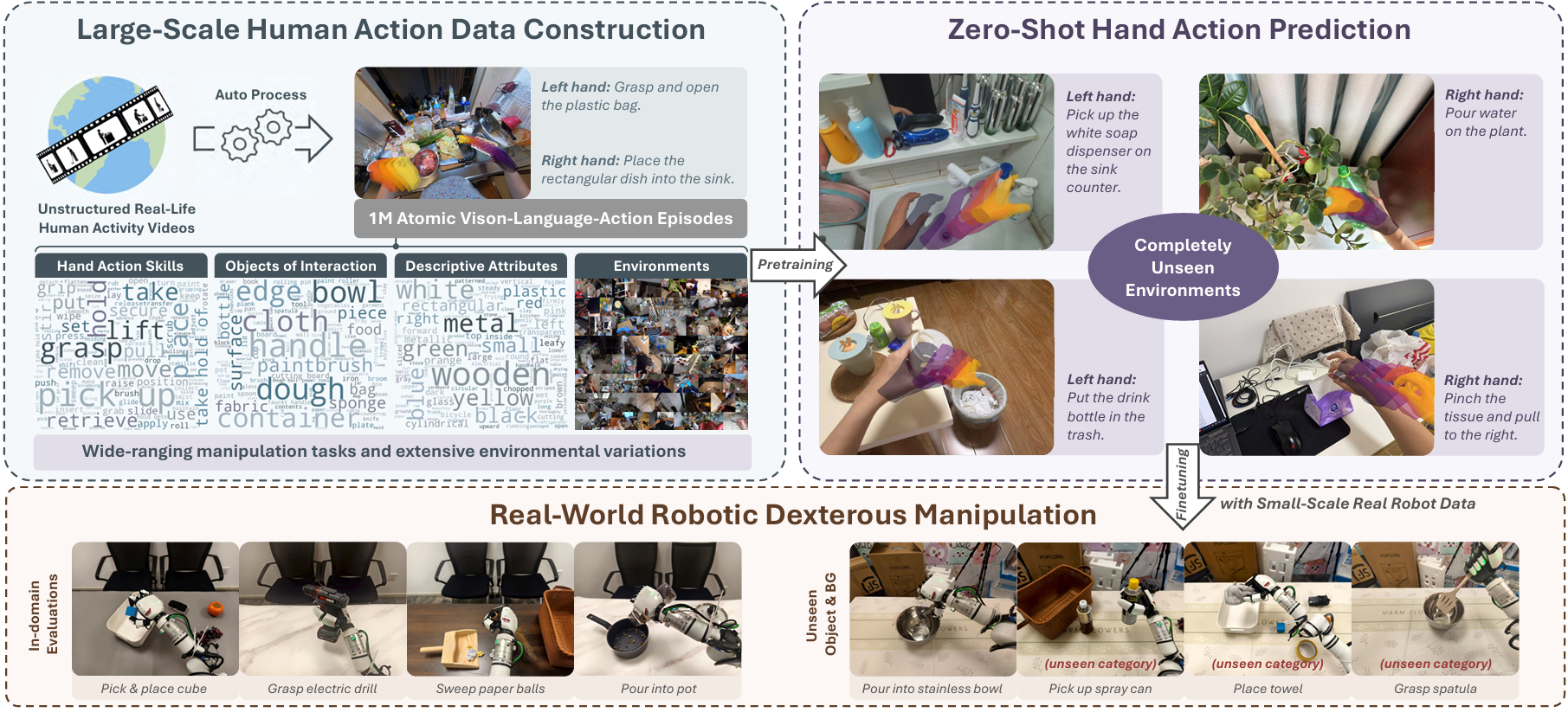
Scalable Vision-Language-Action Model Pretraining for Robotic Manipulation with Real-Life Human Activity Videos
Qixiu Li, Yu Deng, Yaobo Liang, Lin Luo, Lei Zhou, Chengtang Yao, Lingqi Zeng, Zhiyuan Feng, Huizhi Liang, Sicheng Xu, Yizhong Zhang, Xi Chen, Hao Chen, Lily Sun, Dong Chen, Jiaolong Yang, Baining Guo
ICRA 2026
Pretraining VLA models using 1M+ episodes of unlabeled human hand videos.
UniGraspTransformer: Simplified Policy Distillation for Scalable Dexterous Robotic Grasping
Wenbo Wang, Fangyun Wei, Lei Zhou, Xi Chen, Lin Luo, Xiaohan Yi, Yizhong Zhang, Yaobo Liang, Chang Xu, Yan Lu, Jiaolong Yang, Baining Guo
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) 2025
A Transformer-based network for dexterous robotic grasping using policy distillation.
DexGrasp-Diffusion: Diffusion-based Unified Functional Grasp Synthesis Pipeline for Multi-Dexterous Robotic Hands
Zhengshen Zhang, Lei Zhou, Chenchen Liu, Zhiyang Liu, Sheng Guo, Ruiteng Zhao, Marcelo H. Ang Jr., Francis EH Tay
International Symposium on Robotics Research (ISRR) 2024
End-to-end pipeline for functional grasp synthesis using diffusion models.
You Only Scan Once: A Dynamic Scene Reconstruction Pipeline for 6-DoF Robotic Grasping of Novel Objects
Lei Zhou, Haozhe Wang, Zhengshen Zhang, Zhiyang Liu, Francis EH Tay, Marcelo H. Ang Jr.
IEEE International Conference on Robotics and Automation (ICRA) 2024
Dynamic scene reconstruction using NeRF for 6-DoF robotic grasping.
DR-Pose: A Two-stage Deformation-and-Registration Pipeline for Category-level 6D Object Pose Estimation
Lei Zhou, Zhiyang Liu, Runze Gan, Haozhe Wang, Marcelo H. Ang Jr
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2023
Enhancing category-level 6D object pose estimation via deformation and registration.